

Cornell Ranger Robot – 2008
The Cornell Ranger is a bipedal walking robot that uses passive dynamics to achieve a very high energy efficiency. In 2011 it walked 40.5 miles on a single battery charge, the equivalent of 5 cents worth of electricity.
The main goal of my Masters design project was to design a tool to simplify the data visualization and data analysis for our team. At the end of the project the goal is to have a functional data analysis program that incorporates the specific visualization and analysis needs of the Cornell Ranger team, as well as the option of visualizing and analyzing data alongside a video.
MATLAB was chosen as a platform for programming the data analysis tool. The final program consisted of a data analysis and a data with video analysis option. The functions that the program is capable of doing were divided in three sections, the data visualization functions, the data analysis function and the video functions. The data visualization functions are: changing the data file to analyze, changing the variables plotted, moving the cursor to an exact time point, moving discretely along data points, choosing the min and max values of time to be plotted, changing the min and max values of the variables to be plotted, zooming in and out in time and in the variables and showing error messages. The data analysis functions are plotting two variables against each other, plotting more than one variable against time on the same graph, scaling a variable and entering a MATLAB function into the data. The video analysis tools are: moving frame by frame and playing and stopping the video in synch with the data and synchronizing the video and data to a new synch point.
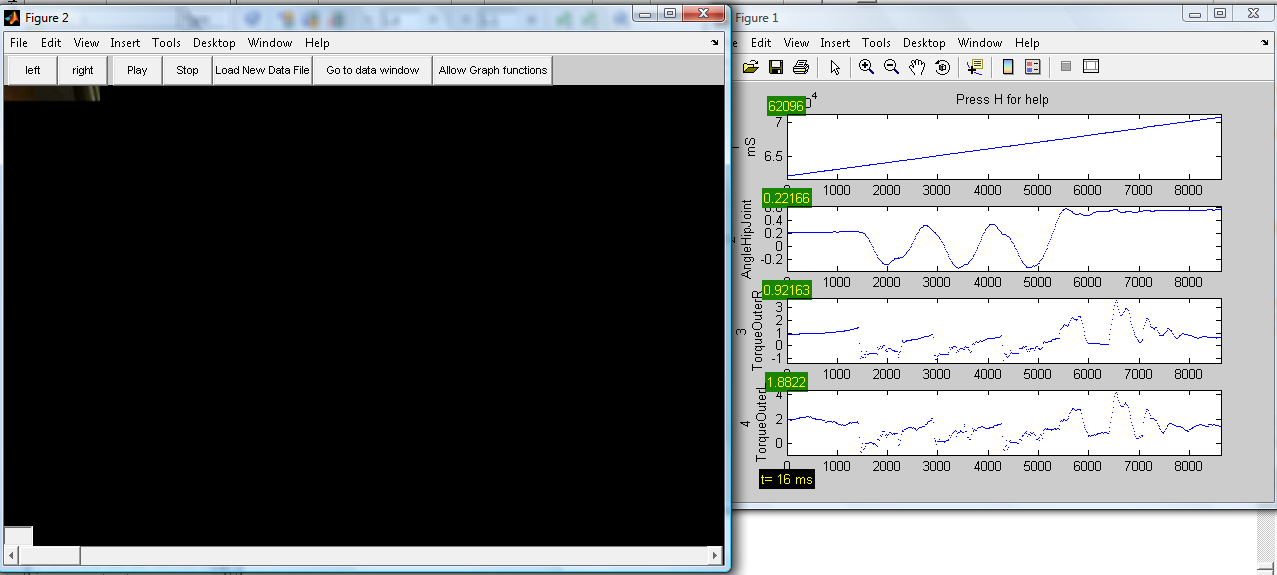
Project Screencap 1
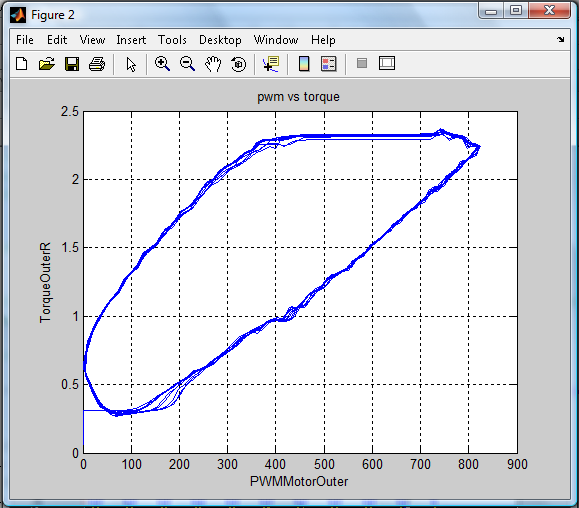
Project Screencap 2
Project Screencap 3
