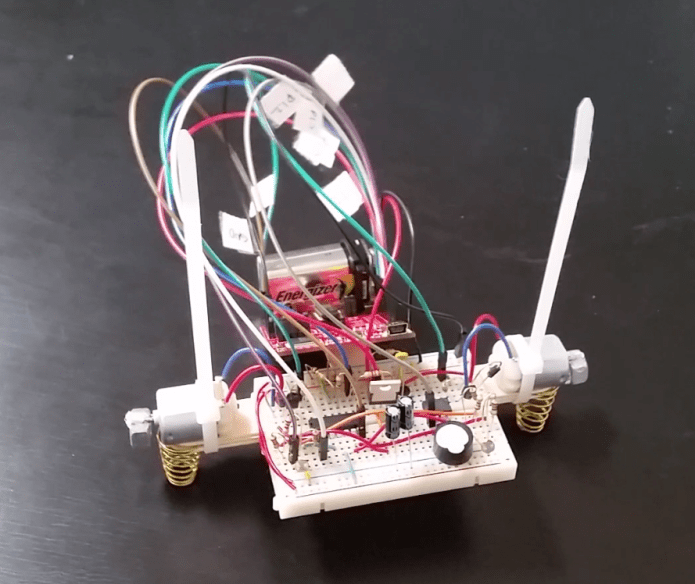
Created during the BerkleyX Electronic Interfaces MOOC, the robot bounces using two weighted DC motors connected to springs. The purpose of this robot was to develop the different electronic circuits to control it and actuate it. Controller circuits include a voltage regulator, a microphone amplifier, a speaker amplifier, two photocell comparators, and two motor drivers. The signal control for the circuits was done using a TI MSP430 microcontroller.
