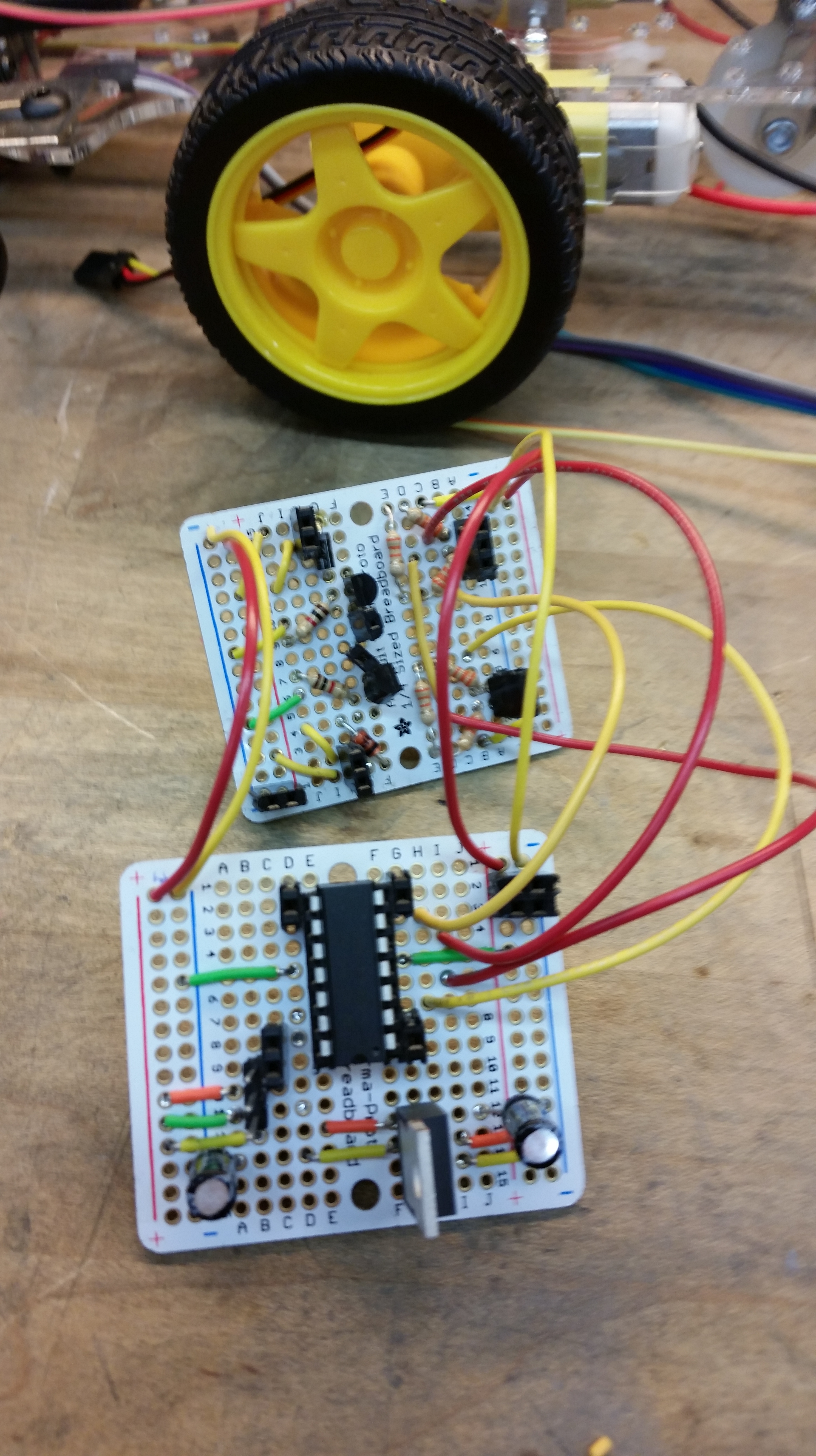
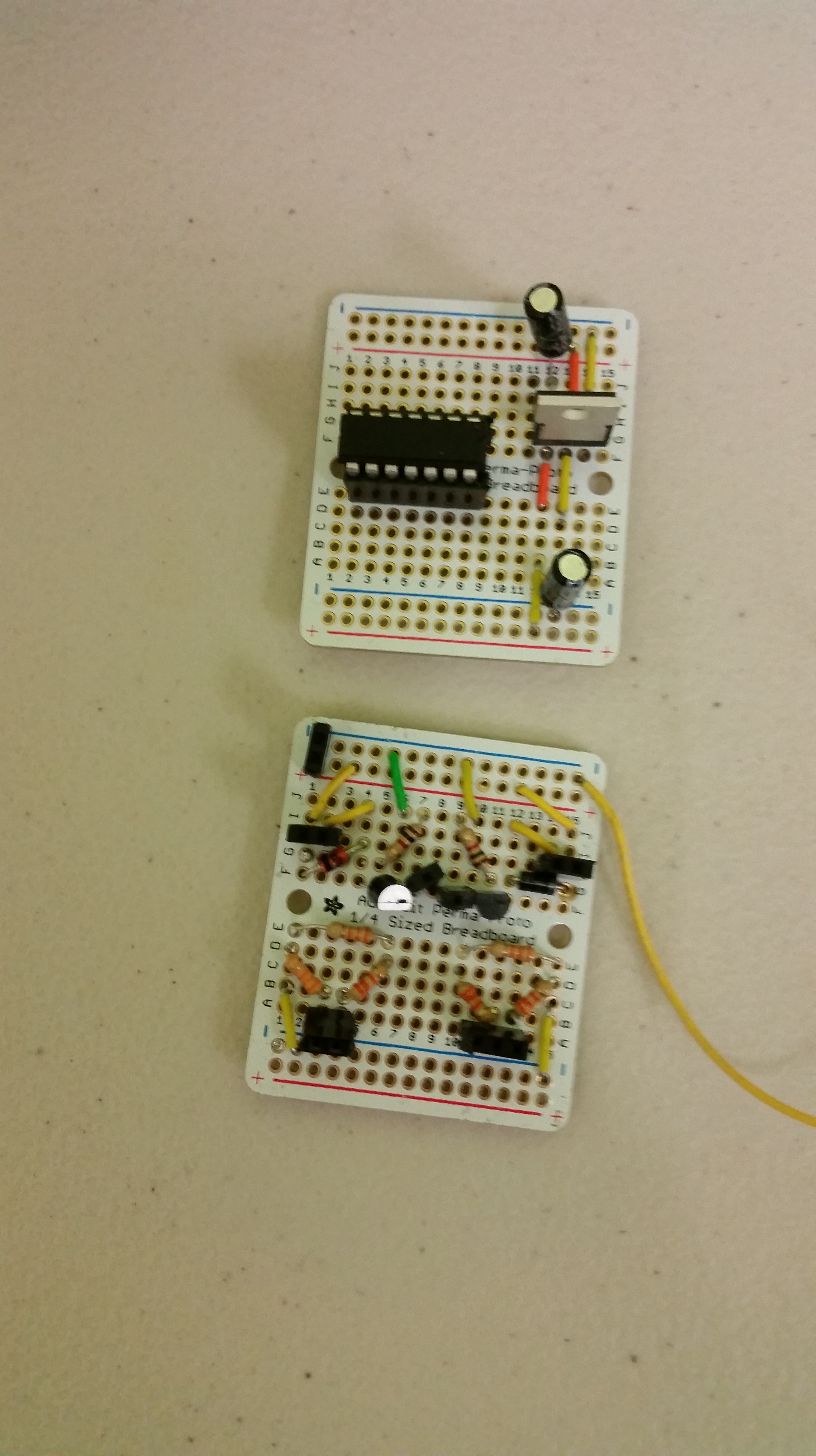
An autonomous robot with a gripper made for the 2015 Vecna Robot Race. This robot used the controller circuits created for the Bouncing Robot with several new additions and modifications. The robot was actuated using two geared DC motors for the wheels and a servo for the gripper. Two infrared proximity sensors and two flex sensors were used to control the robot’s position, another IR sensor was used to activate the gripper if the cup was within it’s range.