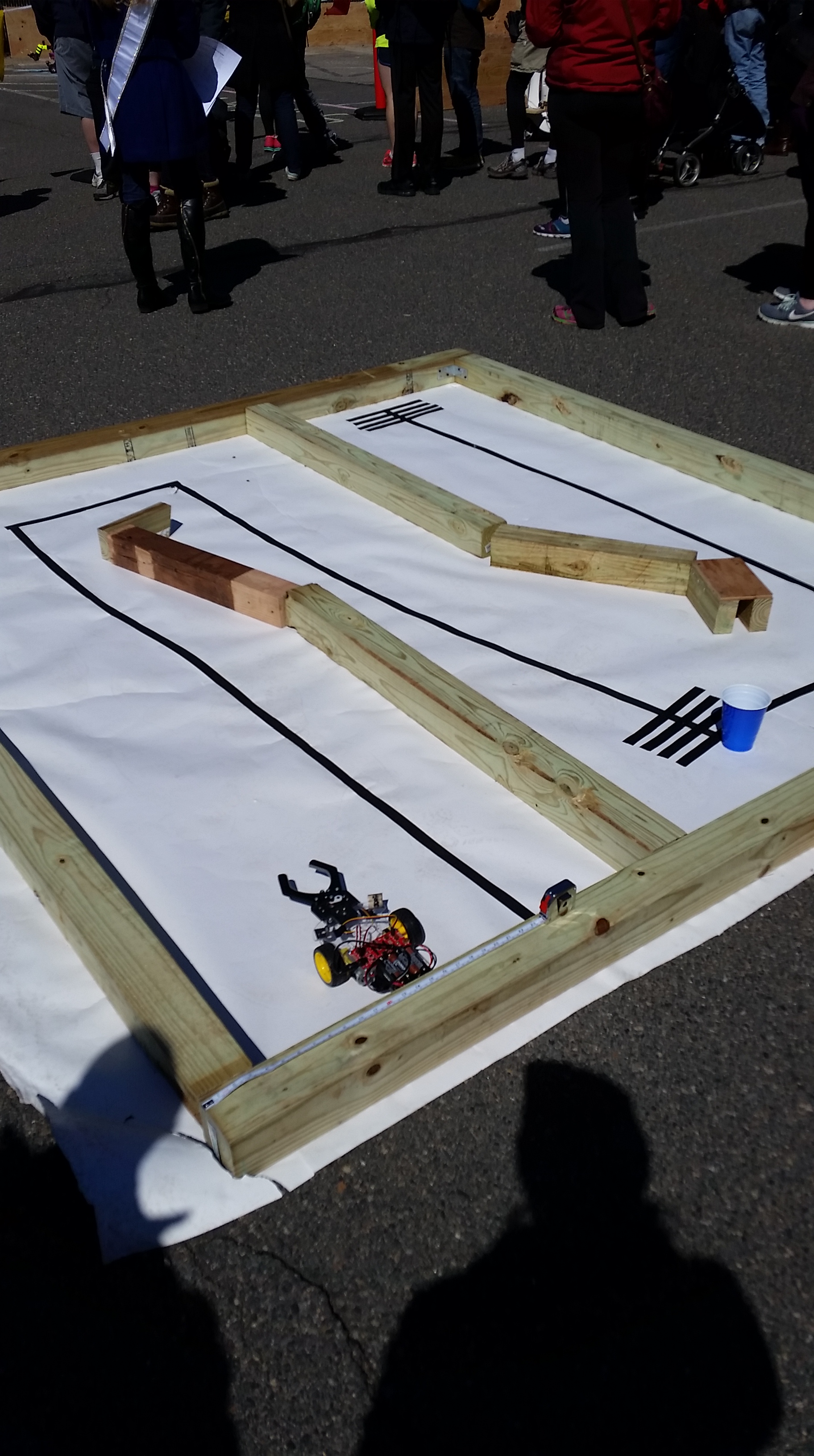
First Place winner for it’s category.
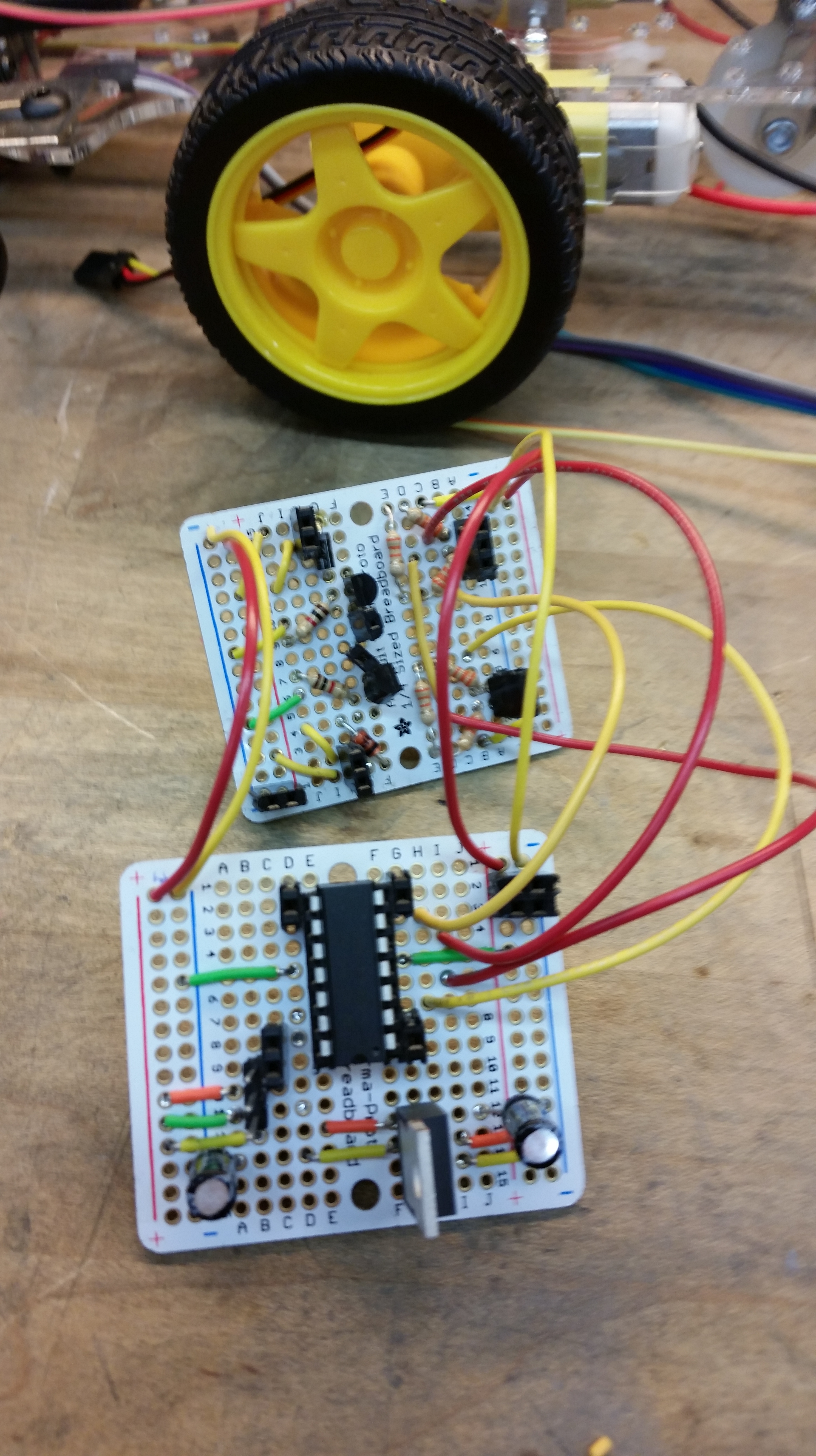
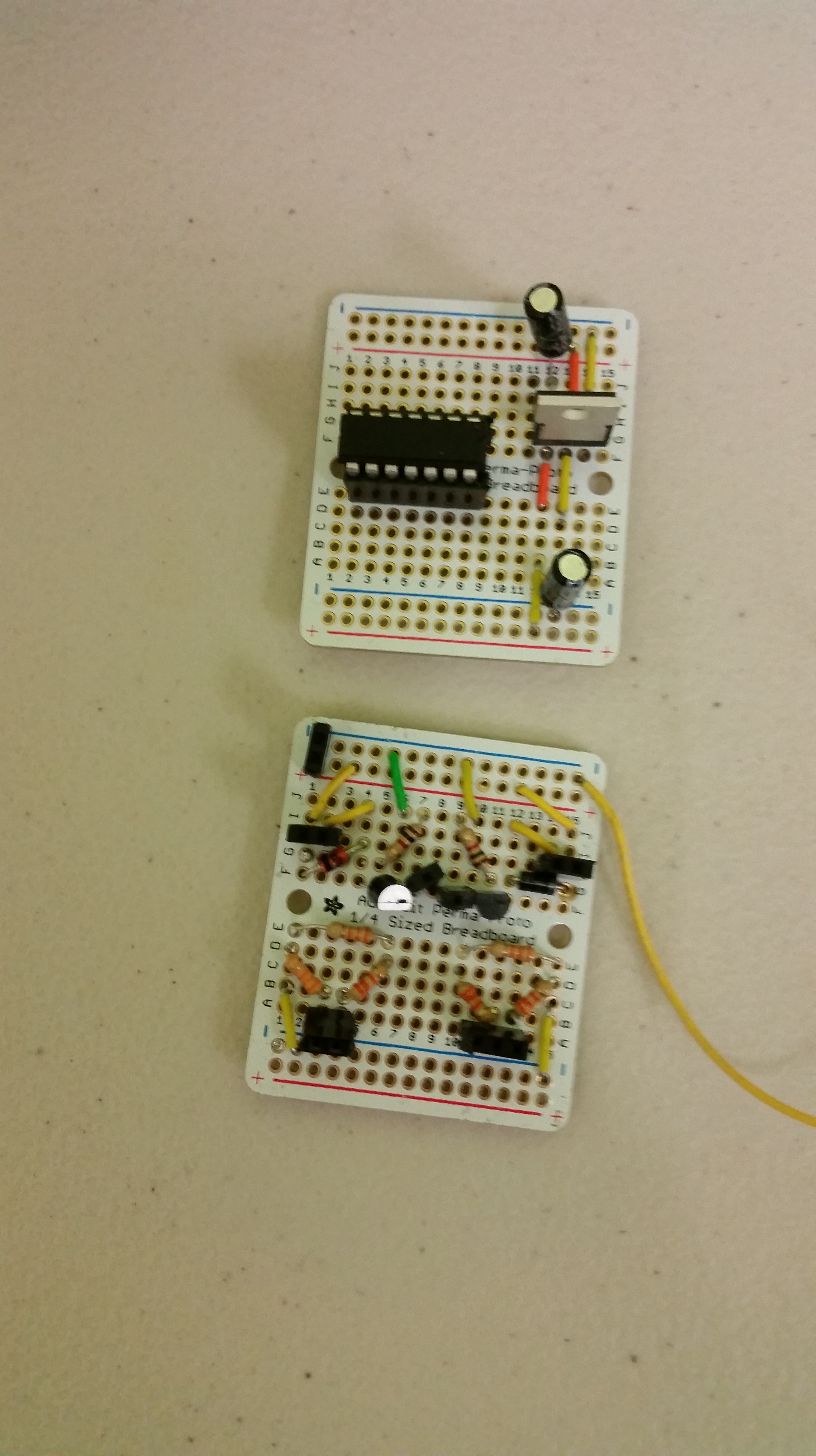
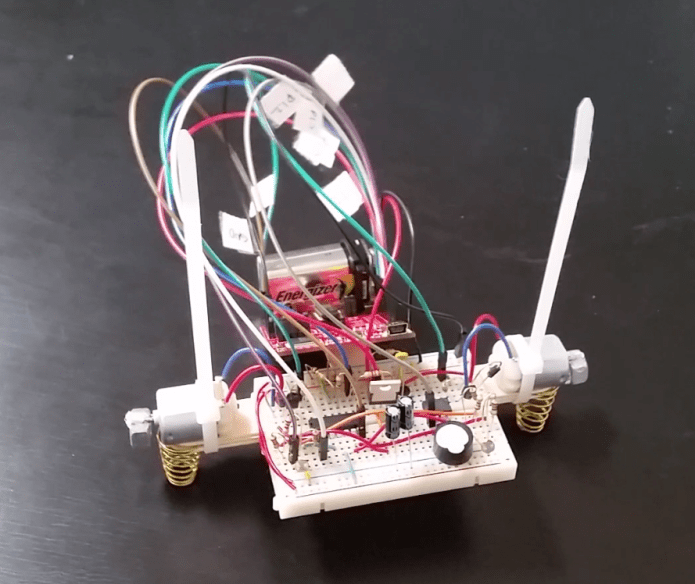
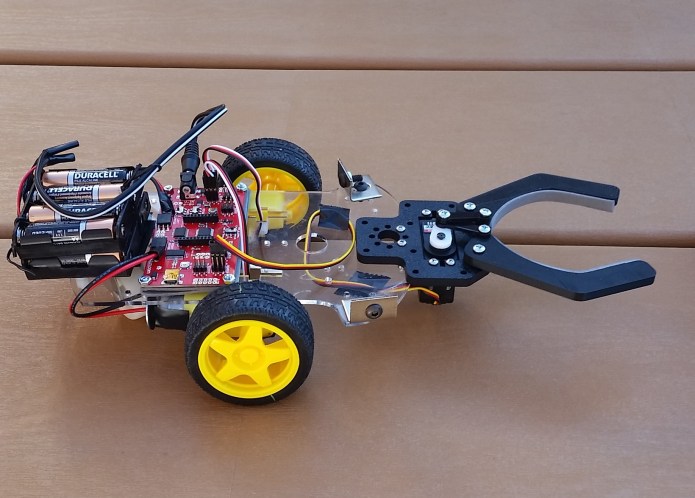
This robot is a modified version of it’s 2015 counterpart. Additions to the design include a 3D printed gripper designed to hold a Solo Cup, a dedicated motor controller board, and magnetic encoders attached to the wheel motors.